
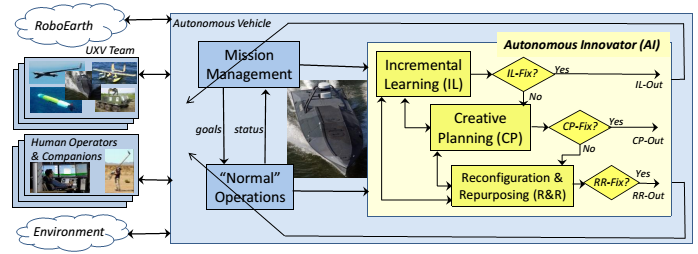
Most autonomous robots in use today perform their tasks by following a fixed plan which they execute repeatedly. With little adaptability, unexpected changes in the environment or the robot itself can disrupt normal operations and threaten productivity. In these situations, human operators are often required to resolve the issue by providing a new plan or addressing the underlying issue. The Autonomous Innovator seeks to provide robots with the adaptability and ingenuity required to perform reliably in variable environments and over extended periods of time with little to no human intervention. The Autonomous Innovator uses three complementary techniques to achieve this: (1) Persistent estimation to better correlate models with real-time observations through incremental learning, (2) Identification and handling of unexpected or unplanned-for situations through creative planning, and (3) reconfiguration and repurposing to autonomously or with limited human/system interaction enable an impaired robot to continue supporting the mission in an altered capacity.
This project is a collaborative effort with the Autonomous Aerospace Systems Lab: http://a2sys.engin.umich.edu/